



Sensor de Distancia Láser ToF VL53L0X
Módulo de telemetría de tiempo de vuelo absoluto e inmunidad al color del objetivo vía interfaz I2C.
El VL53L0X es un sensor de distancia láser de última generación basado en la avanzada tecnología FlightSense™ (Tiempo de Vuelo). A diferencia de los sensores ópticos tradicionales que estiman la distancia midiendo la intensidad de la luz reflejada, este dispositivo calcula con precisión milimétrica el tiempo exacto que tardan los fotones de su emisor láser invisible en rebotar contra el objetivo. Esto lo dota de una inmunidad absoluta frente al color, reflectividad o rugosidad de la superficie a medir. Con un diseño ultra compacto y comunicación digital por bus I2C, representa la solución perfecta para sistemas de posicionamiento robótico y detección de proximidad.
Especificaciones Técnicas
| Parámetro Eléctrico | Rango / Valor Oficial |
|---|---|
| Sistemas Compatibles | Arduino, ESP32, STM32, Raspberry Pi, PIC |
| Voltaje de Alimentación | 2.8 V a 5.0 V DC (Placa con regulador de 3.3V) |
| Corriente de Operación | 10 mA (Media activa) / 40 mA (Pico emisor VCSEL) |
| Corriente en Reposo | 5 µA (Modo de apagado por hardware XSHUT) |
| Protocolo de Bus Digital | I2C (Dirección fija por hardware de 7 bits: 0x29) |
| Velocidad del Reloj I2C | Hasta 400 kHz (Modo Fast-Mode de alta velocidad) |
| Parámetro Operativo / Físico | Rango / Valor Oficial |
|---|---|
| Rango de Medición Útil | 3 cm a 200 cm (2 metros de alcance absoluto) |
| Resolución del Sensor | 1 mm (Mediciones discretas consistentes) |
| Fuente Emisora Láser | Láser VCSEL de 940 nm (Totalmente invisible e inocuo) |
| Clasificación de Seguridad | Clase 1 (Seguro para la vista bajo cualquier uso) |
| Ángulo de Visión (FoV) | 25 Grados (Haz cónico colimado de precisión) |
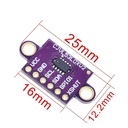
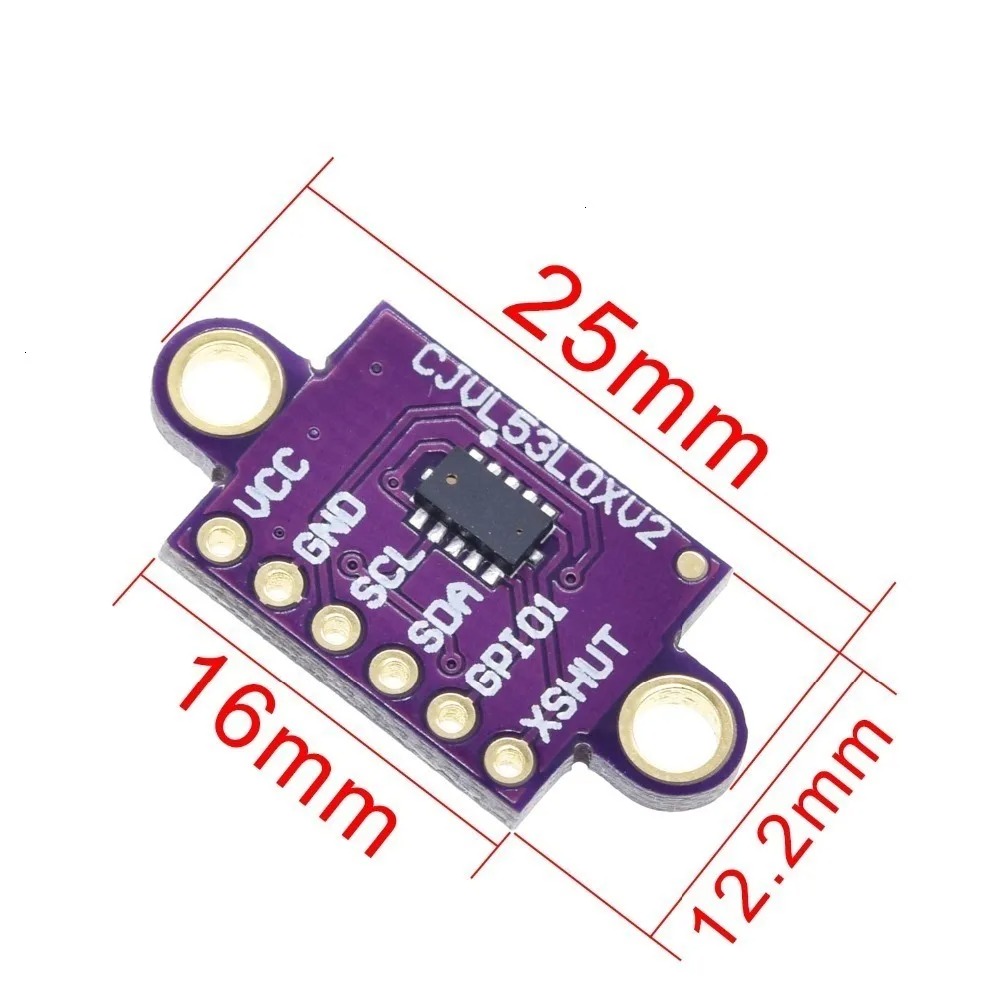
| Dimensiones del Módulo | 13.3 mm x 10.5 mm |
Compatibilidad y Ventajas en Arduino, ESP32 y Proyectos Robóticos
• Precisión Total Independiente del Color: Al medir el tiempo de vuelo de la onda y no su atenuación lumínica, medirá exactamente el mismo valor tanto si el objeto en frente es de color negro mate, blanco brillante, espejo o acrílico translúcido.
• Inmunidad Excepcional al Ruido Ambiental: El micro-emisor VCSEL opera en una longitud de onda infrarroja muy específica (940 nm). Esto permite que el receptor filtre de forma selectiva destellos de luz solar o luminarias interiores, evitando lecturas erráticas.
• Direccionamiento Dinámico de Múltiples Sensores: Aunque su dirección de fábrica en el bus I2C es fija (0x29), el pin de control **XSHUT** integrado permite encender individualmente cada sensor mediante software para reasignarles nuevas direcciones en caliente, permitiendo conectar múltiples módulos al mismo par de cables.
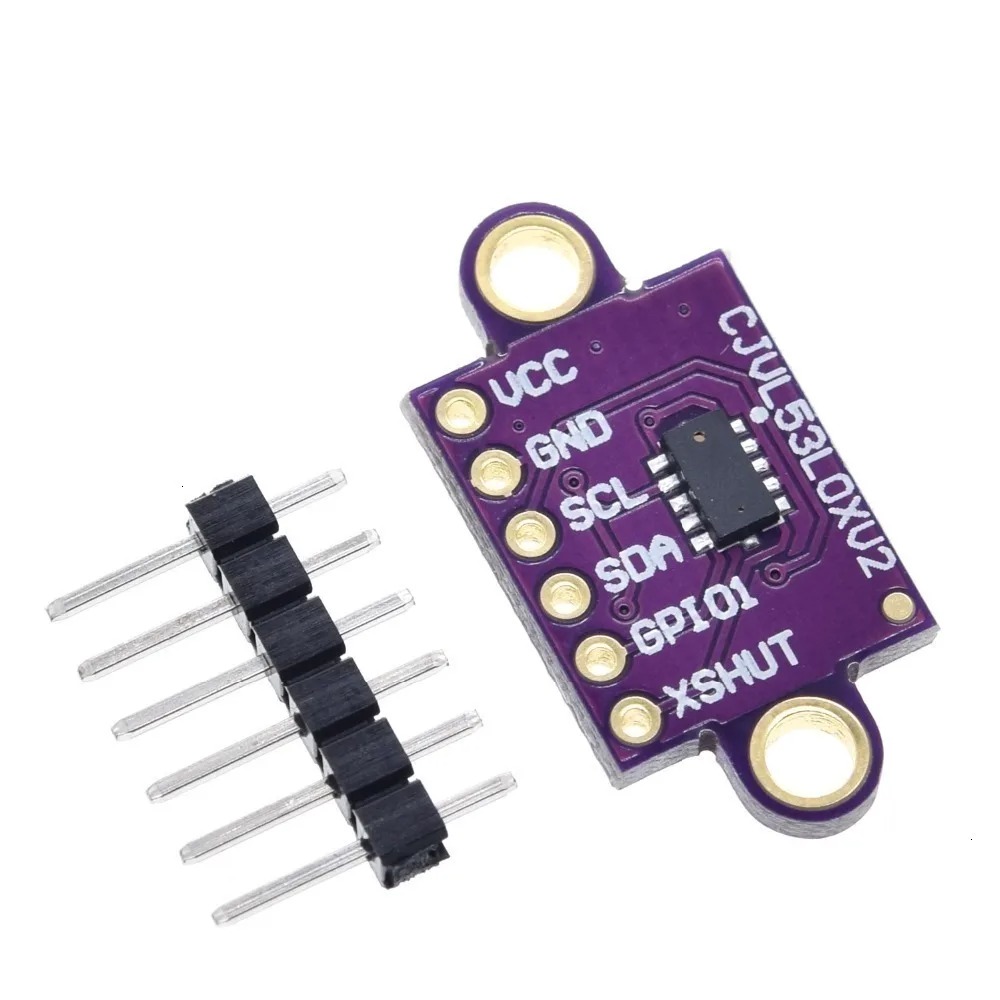
El VL53L0X se comunica mediante el estándar I2C. Cuenta además con pines auxiliares de control de energía y alarmas por interrupción.
Galería Dinámica de Conexiones de Hardware
Para implementar y configurar de manera óptima el software del VL53L0X a través del bus I2C, entienda la física interna de su procesamiento:
- Fórmula del Tiempo de Vuelo (ToF): El núcleo interno emite ráfagas de pulsos láser invisibles de 940 nm. La distancia se resuelve midiendo el desfase temporal mediante la ecuación elemental $$d = \frac{c \cdot t}{2}$$, donde $c$ representa la velocidad de la luz y $t$ es el tiempo total transcurrido en el viaje de ida y vuelta. El cálculo se realiza por hardware dentro del silicio.
- Configuración del Presupuesto de Temporización ("Timing Budget"): Este parámetro define el tiempo total asignado al chip para realizar una única medición de distancia. Puede variarse mediante programación: asignando **20 ms (Modo Alta Velocidad)** se consiguen escaneos muy rápidos idóneos para robots veloces a expensas de mayor ruido, mientras que configurando **200 ms (Modo Alta Precisión)** se promedian miles de muestras reduciendo el error por debajo del milímetro en rangos lejanos.
- Gestión de Direccionamiento de Sensores Múltiples: Dado que todos los VL53L0X arrancan compartiendo la dirección esclava estática **0x29**, conectarlos en paralelo colapsaría el bus. La solución de ingeniería consiste en cablear los pines **XSHUT** a salidas digitales independientes del procesador, arrancar manteniendo todos los módulos apagados (XSHUT en BAJO) e ir encendiéndolos secuencialmente uno a uno para enviarles por comandos I2C su nueva dirección exclusiva de trabajo.
Sensor de Distancia Láser ToF VL53L0X
Módulo de telemetría de tiempo de vuelo absoluto e inmunidad al color del objetivo vía interfaz I2C.
El VL53L0X es un sensor de distancia láser de última generación basado en la avanzada tecnología FlightSense™ (Tiempo de Vuelo). A diferencia de los sensores ópticos tradicionales que estiman la distancia midiendo la intensidad de la luz reflejada, este dispositivo calcula con precisión milimétrica el tiempo exacto que tardan los fotones de su emisor láser invisible en rebotar contra el objetivo. Esto lo dota de una inmunidad absoluta frente al color, reflectividad o rugosidad de la superficie a medir. Con un diseño ultra compacto y comunicación digital por bus I2C, representa la solución perfecta para sistemas de posicionamiento robótico y detección de proximidad.
Especificaciones Técnicas
| Parámetro Eléctrico | Rango / Valor Oficial |
|---|---|
| Sistemas Compatibles | Arduino, ESP32, STM32, Raspberry Pi, PIC |
| Voltaje de Alimentación | 2.8 V a 5.0 V DC (Placa con regulador de 3.3V) |
| Corriente de Operación | 10 mA (Media activa) / 40 mA (Pico emisor VCSEL) |
| Corriente en Reposo | 5 µA (Modo de apagado por hardware XSHUT) |
| Protocolo de Bus Digital | I2C (Dirección fija por hardware de 7 bits: 0x29) |
| Velocidad del Reloj I2C | Hasta 400 kHz (Modo Fast-Mode de alta velocidad) |
| Parámetro Operativo / Físico | Rango / Valor Oficial |
|---|---|
| Rango de Medición Útil | 3 cm a 200 cm (2 metros de alcance absoluto) |
| Resolución del Sensor | 1 mm (Mediciones discretas consistentes) |
| Fuente Emisora Láser | Láser VCSEL de 940 nm (Totalmente invisible e inocuo) |
| Clasificación de Seguridad | Clase 1 (Seguro para la vista bajo cualquier uso) |
| Ángulo de Visión (FoV) | 25 Grados (Haz cónico colimado de precisión) |
| Dimensiones del Módulo | 13.3 mm x 10.5 mm |
Compatibilidad y Ventajas en Arduino, ESP32 y Proyectos Robóticos
• Precisión Total Independiente del Color: Al medir el tiempo de vuelo de la onda y no su atenuación lumínica, medirá exactamente el mismo valor tanto si el objeto en frente es de color negro mate, blanco brillante, espejo o acrílico translúcido.
• Inmunidad Excepcional al Ruido Ambiental: El micro-emisor VCSEL opera en una longitud de onda infrarroja muy específica (940 nm). Esto permite que el receptor filtre de forma selectiva destellos de luz solar o luminarias interiores, evitando lecturas erráticas.
• Direccionamiento Dinámico de Múltiples Sensores: Aunque su dirección de fábrica en el bus I2C es fija (0x29), el pin de control **XSHUT** integrado permite encender individualmente cada sensor mediante software para reasignarles nuevas direcciones en caliente, permitiendo conectar múltiples módulos al mismo par de cables.
El VL53L0X se comunica mediante el estándar I2C. Cuenta además con pines auxiliares de control de energía y alarmas por interrupción.
Galería Dinámica de Conexiones de Hardware
Para implementar y configurar de manera óptima el software del VL53L0X a través del bus I2C, entienda la física interna de su procesamiento:
- Fórmula del Tiempo de Vuelo (ToF): El núcleo interno emite ráfagas de pulsos láser invisibles de 940 nm. La distancia se resuelve midiendo el desfase temporal mediante la ecuación elemental $$d = \frac{c \cdot t}{2}$$, donde $c$ representa la velocidad de la luz y $t$ es el tiempo total transcurrido en el viaje de ida y vuelta. El cálculo se realiza por hardware dentro del silicio.
- Configuración del Presupuesto de Temporización ("Timing Budget"): Este parámetro define el tiempo total asignado al chip para realizar una única medición de distancia. Puede variarse mediante programación: asignando **20 ms (Modo Alta Velocidad)** se consiguen escaneos muy rápidos idóneos para robots veloces a expensas de mayor ruido, mientras que configurando **200 ms (Modo Alta Precisión)** se promedian miles de muestras reduciendo el error por debajo del milímetro en rangos lejanos.
- Gestión de Direccionamiento de Sensores Múltiples: Dado que todos los VL53L0X arrancan compartiendo la dirección esclava estática **0x29**, conectarlos en paralelo colapsaría el bus. La solución de ingeniería consiste en cablear los pines **XSHUT** a salidas digitales independientes del procesador, arrancar manteniendo todos los módulos apagados (XSHUT en BAJO) e ir encendiéndolos secuencialmente uno a uno para enviarles por comandos I2C su nueva dirección exclusiva de trabajo.