SIA-5HG Sensor de Inclinación de Mercurio en PCB
[SIA-5HG] SIA-5HG Sensor de Inclinación de Mercurio en PCB
Referencia Interna:
SIA-5HG
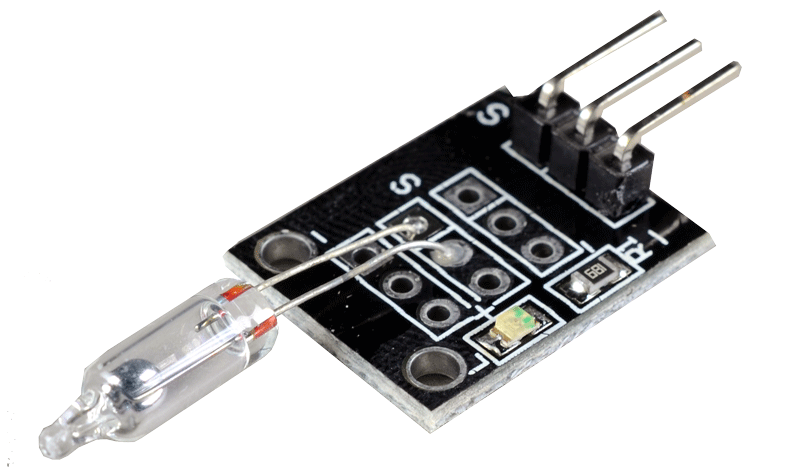
Sensor de Inclinación e Interruptor de Mercurio
Módulo digital de conmutación omnidireccional para detección de posición, nivelación y alarmas de volcado.
El sensor de inclinación por ampolla de mercurio es un dispositivo electromecánico de alta sensibilidad diseñado para detectar variaciones en la orientación espacial o angular de un sistema. En su interior, una pequeña gota de mercurio líquido se desplaza libremente dentro de una cápsula sellada herméticamente; al inclinarse más allá del ángulo umbral, la gota metálica une o separa dos electrodos internos, cerrando o abriendo el circuito de manera directa. Este módulo incorpora acondicionamiento básico de señal para entregar una salida digital (HIGH/LOW) perfectamente compatible con plataformas de desarrollo como Arduino, PIC o PLC.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación (VCC) | 3.3 V a 5.5 V DC |
| Tipo de Salida Lógica | Digital (Binaria HIGH / LOW) |
| Componente de Conmutación | Ampolla sellada de vidrio con Mercurio (Hg) |
| Ángulo de Activación Típico | 15° a 45° (Dependiendo de la orientación inicial) |
| Corriente de Operación | Menor a 10 mA (Bajo consumo lógico) |
| Parámetro | Detalle |
|---|---|
| Resistencia de Contacto Interno | Extremadamente baja (Gota de metal líquido) |
| Configuración de Pines | 3 Pines: VCC, GND y DO (Salida Digital) |
| Indicador Visual a Bordo | LED de estado integrado (Se activa en conmutación) |
| Tipo de Encapsulado | Módulo PCB compacto con perforación de montaje M3 |
| Vida Útil Mecánica | Larga duración gracias al flujo libre del líquido sin desgaste |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Sensor de Mercurio
• Conmutación Limpia de Contactos: Al ser un metal líquido, el mercurio evita el desgaste mecánico por fricción interna y proporciona un contacto eléctrico de excelente conductividad.
• Operación Omnidireccional Simple: No requiere algoritmos complejos de procesamiento de acelerómetros para detecciones de inclinación o vuelco directas.
• Aislamiento Hermético Total: La ampolla de vidrio previene la oxidación de los contactos internos, permitiendo su funcionamiento seguro frente a humedad ambiental.
Código Arduino Completo y Optimizado
Sensor de Inclinación e Interruptor de Mercurio
Módulo digital de conmutación omnidireccional para detección de posición, nivelación y alarmas de volcado.
El sensor de inclinación por ampolla de mercurio es un dispositivo electromecánico de alta sensibilidad diseñado para detectar variaciones en la orientación espacial o angular de un sistema. En su interior, una pequeña gota de mercurio líquido se desplaza libremente dentro de una cápsula sellada herméticamente; al inclinarse más allá del ángulo umbral, la gota metálica une o separa dos electrodos internos, cerrando o abriendo el circuito de manera directa. Este módulo incorpora acondicionamiento básico de señal para entregar una salida digital (HIGH/LOW) perfectamente compatible con plataformas de desarrollo como Arduino, PIC o PLC.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación (VCC) | 3.3 V a 5.5 V DC |
| Tipo de Salida Lógica | Digital (Binaria HIGH / LOW) |
| Componente de Conmutación | Ampolla sellada de vidrio con Mercurio (Hg) |
| Ángulo de Activación Típico | 15° a 45° (Dependiendo de la orientación inicial) |
| Corriente de Operación | Menor a 10 mA (Bajo consumo lógico) |
| Parámetro | Detalle |
|---|---|
| Resistencia de Contacto Interno | Extremadamente baja (Gota de metal líquido) |
| Configuración de Pines | 3 Pines: VCC, GND y DO (Salida Digital) |
| Indicador Visual a Bordo | LED de estado integrado (Se activa en conmutación) |
| Tipo de Encapsulado | Módulo PCB compacto con perforación de montaje M3 |
| Vida Útil Mecánica | Larga duración gracias al flujo libre del líquido sin desgaste |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Sensor de Mercurio
• Conmutación Limpia de Contactos: Al ser un metal líquido, el mercurio evita el desgaste mecánico por fricción interna y proporciona un contacto eléctrico de excelente conductividad.
• Operación Omnidireccional Simple: No requiere algoritmos complejos de procesamiento de acelerómetros para detecciones de inclinación o vuelco directas.
• Aislamiento Hermético Total: La ampolla de vidrio previene la oxidación de los contactos internos, permitiendo su funcionamiento seguro frente a humedad ambiental.