RCWL-0516 Sensor de Movimiento Radar Doppler RCWL-9196
[RCWL-0516] RCWL-0516 Sensor de Movimiento Radar Doppler RCWL-9196
Referencia Interna:
RCWL-0516
Sensor de Movimiento por Radar Doppler de Microondas (RCWL-0516)
Módulo de inducción electromagnética para detección de presencia a través de obstáculos físicos.
El módulo RCWL-0516 es un sensor de movimiento por microondas basado en la tecnología de radar Doppler. A diferencia de los sensores PIR tradicionales, este dispositivo puede detectar objetos en movimiento a través de materiales como plástico, vidrio y paredes delgadas, ofreciendo un rango de detección de 5 a 7 metros. Funciona con un amplio voltaje de alimentación y entrega una salida digital TTL limpia, haciéndolo ideal para sistemas de automatización, seguridad inteligente y proyectos de domótica eficientes.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación (VIN) | DC 4.0 V a 28.0 V |
| Corriente de Operación | 2.8 mA (Típica) / 3.0 mA (Máxima) |
| Distancia de Detección | 5 a 7 Metros (Aproximado) |
| Frecuencia de Operación | ~3.18 GHz (Banda de microondas) |
| Potencia de Transmisión | 20 mW (Típica) / 30 mW (Máxima) |
| Parámetro | Detalle |
|---|---|
| Nivel de Salida Digital (OUT) | 3.3V TTL (Alto con movimiento / Bajo en reposo) |
| Tiempo de Bloqueo / Disparo | 2 Segundos (Típico por pulso activo) |
| Salida de Voltaje Regulada | 3.3 V DC disponible en pin 3V3 (Hasta 100mA) |
| Pin de Control CDS | Permite añadir fotorresistencia para inhibición diurna |
| Temperatura de Trabajo | -20 °C a 80 °C |
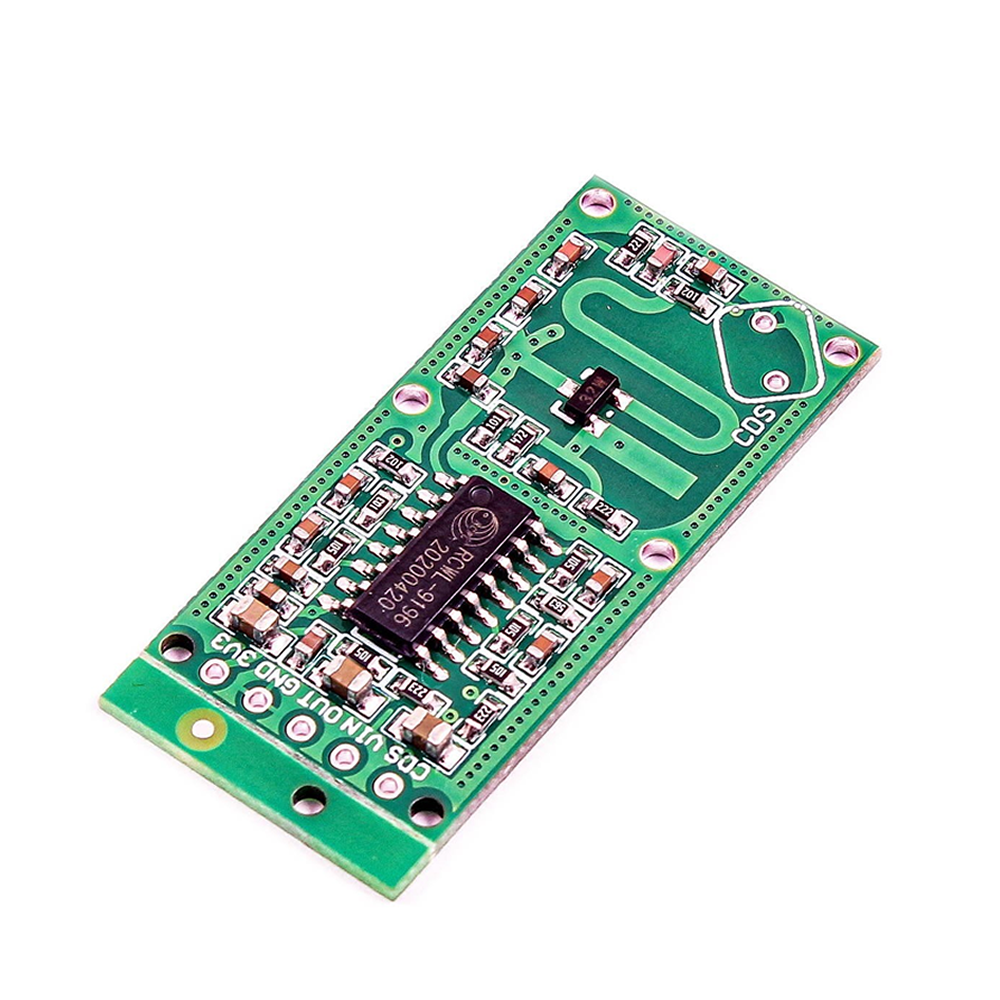
Diagrama de Conexiones y Mapeo de Pines
Ventajas del RCWL-0516
• Penetración de Obstáculos No Metálicos: Capacidad única de detectar movimiento a través de carcasas plásticas, acrílicos y paneles de madera sin perder sensibilidad.
• Detección Omnidireccional de 360 Grados: Su patrón de radiación es esférico, superando la limitación angular de los lentes Fresnel de los sensores infrarrojos tradicionales.
• Personalización por Hardware Avanzada: Cuenta con pads traseros para soldar componentes SMD y ajustar la distancia (R-GN), el tiempo de activación (R-C) o el umbral de luz (R-CDS).
Código Arduino Completo y Optimizado
Sensor de Movimiento por Radar Doppler de Microondas (RCWL-0516)
Módulo de inducción electromagnética para detección de presencia a través de obstáculos físicos.
El módulo RCWL-0516 es un sensor de movimiento por microondas basado en la tecnología de radar Doppler. A diferencia de los sensores PIR tradicionales, este dispositivo puede detectar objetos en movimiento a través de materiales como plástico, vidrio y paredes delgadas, ofreciendo un rango de detección de 5 a 7 metros. Funciona con un amplio voltaje de alimentación y entrega una salida digital TTL limpia, haciéndolo ideal para sistemas de automatización, seguridad inteligente y proyectos de domótica eficientes.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación (VIN) | DC 4.0 V a 28.0 V |
| Corriente de Operación | 2.8 mA (Típica) / 3.0 mA (Máxima) |
| Distancia de Detección | 5 a 7 Metros (Aproximado) |
| Frecuencia de Operación | ~3.18 GHz (Banda de microondas) |
| Potencia de Transmisión | 20 mW (Típica) / 30 mW (Máxima) |
| Parámetro | Detalle |
|---|---|
| Nivel de Salida Digital (OUT) | 3.3V TTL (Alto con movimiento / Bajo en reposo) |
| Tiempo de Bloqueo / Disparo | 2 Segundos (Típico por pulso activo) |
| Salida de Voltaje Regulada | 3.3 V DC disponible en pin 3V3 (Hasta 100mA) |
| Pin de Control CDS | Permite añadir fotorresistencia para inhibición diurna |
| Temperatura de Trabajo | -20 °C a 80 °C |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del RCWL-0516
• Penetración de Obstáculos No Metálicos: Capacidad única de detectar movimiento a través de carcasas plásticas, acrílicos y paneles de madera sin perder sensibilidad.
• Detección Omnidireccional de 360 Grados: Su patrón de radiación es esférico, superando la limitación angular de los lentes Fresnel de los sensores infrarrojos tradicionales.
• Personalización por Hardware Avanzada: Cuenta con pads traseros para soldar componentes SMD y ajustar la distancia (R-GN), el tiempo de activación (R-C) o el umbral de luz (R-CDS).