Sensor de Temperatura sin Contacto MLX90614
[MLX90614-PCB] Sensor de Temperatura sin Contacto MLX90614
Referencia Interna:
MLX90614-PCB
Sensor Infrarrojo Digital MLX90614 de Temperatura Sin Contacto
Termómetro digital e inteligente de alta resolución con salida I2C y PWM compatible con microcontroladores de 3.3V y 5V.
El MLX90614 es un sensor de temperatura infrarrojo de alto rendimiento diseñado para mediciones térmicas precisas a distancia y sin contacto físico directo. Su arquitectura interna encapsula en una unidad compacta tipo TO-39 un detector de termopila sensible a la radiación IR y un chip de procesamiento de señal especializado (ASIC) con un ADC de 17 bits de bajo ruido. Este transductor proporciona dos lecturas simultáneas e independientes mediante registros internos: la temperatura interna del propio encapsulado (ambiente) y la temperatura real del objeto situado en su campo de visión (FOV). Gracias a su calibración de fábrica y su compensación térmica dinámica, entrega tramas lógicas directas en grados Celsius bajo el estándar SMBus (compatible con I2C) o mediante una señal de modulación por ancho de pulso (PWM) continua. Su robustez lo convierte en la elección ideal para termómetros médicos digitales, control de procesos industriales de calor y monitoreo automotriz.
Especificaciones Técnicas
| Parámetro Operativo | Rango / Valor Oficial |
|---|---|
| Sistemas Compatibles | Arduino, ESP32, Raspberry Pi, STM32, PIC |
| Voltaje de Operación | 3.3 V a 5.0 V DC (Según versión del módulo) |
| Consumo de Corriente | 1.5 mA a 2.5 mA (Operación normal continua) |
| Protocolo Principal | SMBus (Compatible con bus de datos I2C) |
| Salida Secundaria | PWM configurable de 10 bits independiente |
| Rango Objeto (TO) | -70 °C a +382.2 °C (Medición IR a distancia) |
| Rango Ambiente (TA) | -40 °C a +125 °C (Temperatura del chip) |
| Parámetro Mecánico / Señal | Rango / Valor Oficial |
|---|---|
| Precisión Médica | ±0.5 °C en el rango corporal (36°C a 38°C) |
| Resolución de Salida | 0.02 °C de sensibilidad por registro digital |
| Campo de Visión (FOV) | 90° estándar (Modelos BAA/DCI varían a 35° o 10°) |
| Resolución del ADC | Convertidor interno de 17 bits integrado |
| Dirección I2C por Defecto | 0x5A de 7 bits (Modificable en la EEPROM) |
| Tipo de Encapsulado | Hermético metálico TO-39 con filtro óptico |
| Peso Neto del Módulo | 2.1 gramos (Ensamblado en PCB breakout) |
Compatibilidad y Ventajas en Arduino, ESP32 y Raspberry Pi
• Lectura Térmica Dual e Independiente: El firmware adquiere de manera simultánea tanto la temperatura ambiental propia del nodo como la temperatura infrarroja del objeto apuntado, facilitando cálculos avanzados de compensación ambiental en sistemas inteligentes sin añadir termistores secundarios.
• Tolerancia de Voltaje e Integración en Módulos: Las placas breakout comerciales incorporan diodos de protección y un regulador de voltaje LDO de 3.3V, permitiendo su acoplamiento directo tanto a microcontroladores de 5V como el **Arduino Uno** como a procesadores de 3.3V como el **ESP32**.
• Precisión de Grado Médico Calibrada: Su bajo coeficiente de error de ±0.5 °C dentro de los rangos de temperatura humana lo convierte en el dispositivo ideal para construir arcos de control de accesos automáticos, quioscos de salud inteligentes y proyectos IoT sanitarios portátiles.
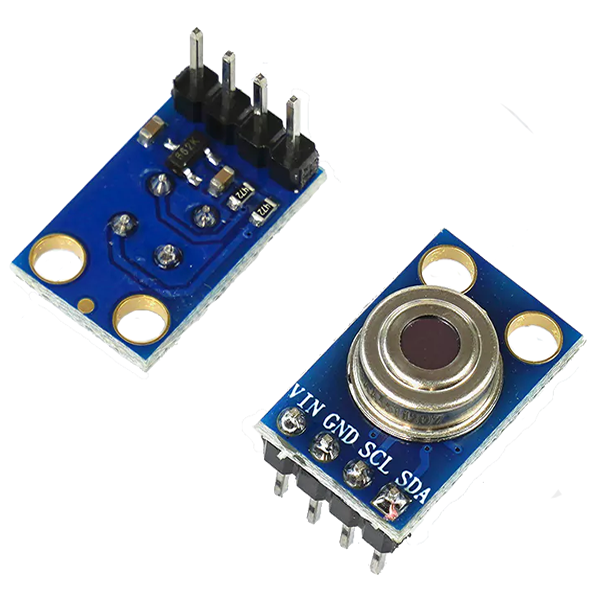
La comunicación con el MLX90614 se gestiona de forma nativa a través del protocolo SMBus, cuyas tramas y temporizaciones son compatibles con el estándar físico de bus de dos hilos I2C. El módulo utiliza dos terminales de alimentación y dos dedicados a las señales lógicas síncronas de datos y reloj.
Galería Dinámica de Conexiones de Hardware
Para garantizar una lectura libre de ruidos electromagnéticos y aprovechar al máximo las prestaciones digitales del MLX90614, revise con atención las siguientes pautas de ingeniería:
- Compatibilidad de Librería Adafruit: Este programa fuente emplea la librería
Adafruit_MLX90614. Esta clase encapsula de forma nativa las tramas estructuradas de repetición de inicio (Repeated Start condition) que exige el protocolo SMBus del chip, resolviendo de manera transparente los desfases temporales que suelen trabar el bus estándar Wire en procesadores antiguos. - Comprensión del Factor FOV (Cono de Medición): La zona de lectura del sensor expande un cono óptico de aproximadamente 90 grados en las versiones estándar (MLX90614ESF-BAA). Esto significa que a mayor distancia, el sensor promediará la radiación del objeto junto con la del fondo del entorno. Para lecturas puntuales a más de 5 cm de distancia, se recomienda utilizar variantes focalizadas como la DCI o DCH (campo estrecho de 10° o 5°).
- Efectos Térmicos por Conducción: Si el encapsulado metálico TO-39 del MLX90614 se calienta por la proximidad de reguladores, pantallas o las propias pistas calientes del circuito, el registro de temperatura ambiente variará falseando la compensación interna. Se recomienda aislarlo físicamente de fuentes térmicas locales.
Sensor Infrarrojo Digital MLX90614 de Temperatura Sin Contacto
Termómetro digital e inteligente de alta resolución con salida I2C y PWM compatible con microcontroladores de 3.3V y 5V.
El MLX90614 es un sensor de temperatura infrarrojo de alto rendimiento diseñado para mediciones térmicas precisas a distancia y sin contacto físico directo. Su arquitectura interna encapsula en una unidad compacta tipo TO-39 un detector de termopila sensible a la radiación IR y un chip de procesamiento de señal especializado (ASIC) con un ADC de 17 bits de bajo ruido. Este transductor proporciona dos lecturas simultáneas e independientes mediante registros internos: la temperatura interna del propio encapsulado (ambiente) y la temperatura real del objeto situado en su campo de visión (FOV). Gracias a su calibración de fábrica y su compensación térmica dinámica, entrega tramas lógicas directas en grados Celsius bajo el estándar SMBus (compatible con I2C) o mediante una señal de modulación por ancho de pulso (PWM) continua. Su robustez lo convierte en la elección ideal para termómetros médicos digitales, control de procesos industriales de calor y monitoreo automotriz.
Especificaciones Técnicas
| Parámetro Operativo | Rango / Valor Oficial |
|---|---|
| Sistemas Compatibles | Arduino, ESP32, Raspberry Pi, STM32, PIC |
| Voltaje de Operación | 3.3 V a 5.0 V DC (Según versión del módulo) |
| Consumo de Corriente | 1.5 mA a 2.5 mA (Operación normal continua) |
| Protocolo Principal | SMBus (Compatible con bus de datos I2C) |
| Salida Secundaria | PWM configurable de 10 bits independiente |
| Rango Objeto (TO) | -70 °C a +382.2 °C (Medición IR a distancia) |
| Rango Ambiente (TA) | -40 °C a +125 °C (Temperatura del chip) |
| Parámetro Mecánico / Señal | Rango / Valor Oficial |
|---|---|
| Precisión Médica | ±0.5 °C en el rango corporal (36°C a 38°C) |
| Resolución de Salida | 0.02 °C de sensibilidad por registro digital |
| Campo de Visión (FOV) | 90° estándar (Modelos BAA/DCI varían a 35° o 10°) |
| Resolución del ADC | Convertidor interno de 17 bits integrado |
| Dirección I2C por Defecto | 0x5A de 7 bits (Modificable en la EEPROM) |
| Tipo de Encapsulado | Hermético metálico TO-39 con filtro óptico |
| Peso Neto del Módulo | 2.1 gramos (Ensamblado en PCB breakout) |
Compatibilidad y Ventajas en Arduino, ESP32 y Raspberry Pi
• Lectura Térmica Dual e Independiente: El firmware adquiere de manera simultánea tanto la temperatura ambiental propia del nodo como la temperatura infrarroja del objeto apuntado, facilitando cálculos avanzados de compensación ambiental en sistemas inteligentes sin añadir termistores secundarios.
• Tolerancia de Voltaje e Integración en Módulos: Las placas breakout comerciales incorporan diodos de protección y un regulador de voltaje LDO de 3.3V, permitiendo su acoplamiento directo tanto a microcontroladores de 5V como el **Arduino Uno** como a procesadores de 3.3V como el **ESP32**.
• Precisión de Grado Médico Calibrada: Su bajo coeficiente de error de ±0.5 °C dentro de los rangos de temperatura humana lo convierte en el dispositivo ideal para construir arcos de control de accesos automáticos, quioscos de salud inteligentes y proyectos IoT sanitarios portátiles.
La comunicación con el MLX90614 se gestiona de forma nativa a través del protocolo SMBus, cuyas tramas y temporizaciones son compatibles con el estándar físico de bus de dos hilos I2C. El módulo utiliza dos terminales de alimentación y dos dedicados a las señales lógicas síncronas de datos y reloj.
Galería Dinámica de Conexiones de Hardware
Para garantizar una lectura libre de ruidos electromagnéticos y aprovechar al máximo las prestaciones digitales del MLX90614, revise con atención las siguientes pautas de ingeniería:
- Compatibilidad de Librería Adafruit: Este programa fuente emplea la librería
Adafruit_MLX90614. Esta clase encapsula de forma nativa las tramas estructuradas de repetición de inicio (Repeated Start condition) que exige el protocolo SMBus del chip, resolviendo de manera transparente los desfases temporales que suelen trabar el bus estándar Wire en procesadores antiguos. - Comprensión del Factor FOV (Cono de Medición): La zona de lectura del sensor expande un cono óptico de aproximadamente 90 grados en las versiones estándar (MLX90614ESF-BAA). Esto significa que a mayor distancia, el sensor promediará la radiación del objeto junto con la del fondo del entorno. Para lecturas puntuales a más de 5 cm de distancia, se recomienda utilizar variantes focalizadas como la DCI o DCH (campo estrecho de 10° o 5°).
- Efectos Térmicos por Conducción: Si el encapsulado metálico TO-39 del MLX90614 se calienta por la proximidad de reguladores, pantallas o las propias pistas calientes del circuito, el registro de temperatura ambiente variará falseando la compensación interna. Se recomienda aislarlo físicamente de fuentes térmicas locales.