LL-DIGIT Led Láser Sensor con Receptor para Arduino
[LL-DIGIT] LL-DIGIT Led Láser Sensor con Receptor para Arduino
Referencia Interna:
LL-DIGIT
Sensor Láser con Receptor Digital (LL-DIGIT)
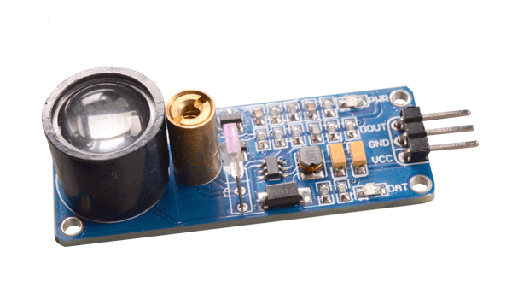
Módulo detector de barrera óptica con emisor LED láser concentrado y salida digital TTL condicional.
El módulo de sensor y receptor láser digital LL-DIGIT es un sistema optoelectrónico de alto rendimiento diseñado para la detección de interrupciones mecánicas a distancias prolongadas. Este dispositivo integra un emisor de diodo láser focalizado de 650 nm y una tarjeta receptora dotada de un fototransistor con circuito de acondicionamiento digital a bordo. Al incidir el haz sobre el receptor, la placa conmuta de forma inmediata entregando un nivel lógico TTL (Alto/Bajo) sin requerir filtrados analógicos complejos. Su diseño compacto lo convierte en la herramienta ideal para la implementación de barreras perimetrales de seguridad, contadores rápidos en líneas de producción y sistemas de posicionamiento robótico inmunes a la dispersión térmica.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 5.0 V Estables |
| Corriente de Operación | < 35 mA (Emisor y Receptor activos) |
| Longitud de Onda Láser | 650 nm (Espectro rojo visible) |
| Tipo de Salida de Datos | Digital TTL (Lógica binaria directa) |
| Distancia Efectiva Máxima | Hasta 15 metros (Línea de visión alineada) |
| Ángulo de Recepción | ±15° Grados de tolerancia óptica |
| Parámetro | Detalle |
|---|---|
| Tiempo de Respuesta | < 2.0 ms (Conmutación de alta velocidad) |
| Lógica de Salida Predeterminada | Salida en ALTO al incidir / BAJO obstruido |
| Temperatura de Trabajo | -25 °C a +75 °C |
| Indicadores integrados | LED piloto de encendido e indicador de señal |
| Distribución de Pines | VCC, GND, DO (Digital Output) |
| Tipo de Encapsulado | Módulo PCB con perforaciones de montaje M3 |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Inmunidad Óptica Avanzada: La tarjeta receptora incorpora filtros físicos de paso de banda lumínica que reducen drásticamente las lecturas falsas causadas por focos incandescentes o la luz solar indirecta del ambiente.
• Focalización de Largo Alcance: A diferencia de los sensores infrarrojos estándar, el haz colimado del láser rojo permite monitorear distancias métricas considerables sin perder potencia ni abrir el haz de cobertura.
• Conexión Directa sin Acondicionamiento: Al entregar una señal puramente cuadrada y acondicionada digitalmente, se acopla directamente a pines de entrada genéricos de microcontroladores sin requerir etapas de amplificación operacional externas.
Código Arduino Completo y Optimizado
Sensor Láser con Receptor Digital (LL-DIGIT)
Módulo detector de barrera óptica con emisor LED láser concentrado y salida digital TTL condicional.
El módulo de sensor y receptor láser digital LL-DIGIT es un sistema optoelectrónico de alto rendimiento diseñado para la detección de interrupciones mecánicas a distancias prolongadas. Este dispositivo integra un emisor de diodo láser focalizado de 650 nm y una tarjeta receptora dotada de un fototransistor con circuito de acondicionamiento digital a bordo. Al incidir el haz sobre el receptor, la placa conmuta de forma inmediata entregando un nivel lógico TTL (Alto/Bajo) sin requerir filtrados analógicos complejos. Su diseño compacto lo convierte en la herramienta ideal para la implementación de barreras perimetrales de seguridad, contadores rápidos en líneas de producción y sistemas de posicionamiento robótico inmunes a la dispersión térmica.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 5.0 V Estables |
| Corriente de Operación | < 35 mA (Emisor y Receptor activos) |
| Longitud de Onda Láser | 650 nm (Espectro rojo visible) |
| Tipo de Salida de Datos | Digital TTL (Lógica binaria directa) |
| Distancia Efectiva Máxima | Hasta 15 metros (Línea de visión alineada) |
| Ángulo de Recepción | ±15° Grados de tolerancia óptica |
| Parámetro | Detalle |
|---|---|
| Tiempo de Respuesta | < 2.0 ms (Conmutación de alta velocidad) |
| Lógica de Salida Predeterminada | Salida en ALTO al incidir / BAJO obstruido |
| Temperatura de Trabajo | -25 °C a +75 °C |
| Indicadores integrados | LED piloto de encendido e indicador de señal |
| Distribución de Pines | VCC, GND, DO (Digital Output) |
| Tipo de Encapsulado | Módulo PCB con perforaciones de montaje M3 |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Inmunidad Óptica Avanzada: La tarjeta receptora incorpora filtros físicos de paso de banda lumínica que reducen drásticamente las lecturas falsas causadas por focos incandescentes o la luz solar indirecta del ambiente.
• Focalización de Largo Alcance: A diferencia de los sensores infrarrojos estándar, el haz colimado del láser rojo permite monitorear distancias métricas considerables sin perder potencia ni abrir el haz de cobertura.
• Conexión Directa sin Acondicionamiento: Al entregar una señal puramente cuadrada y acondicionada digitalmente, se acopla directamente a pines de entrada genéricos de microcontroladores sin requerir etapas de amplificación operacional externas.