ITR9606 Modulo Opto interruptor, Sensor de Ranura Infrarrojo para Detección de Velocidad y Posición
[ITR9606] ITR9606 Modulo Opto interruptor, Sensor de Ranura Infrarrojo para Detección de Velocidad y Posición
Referencia Interna:
ITR9606
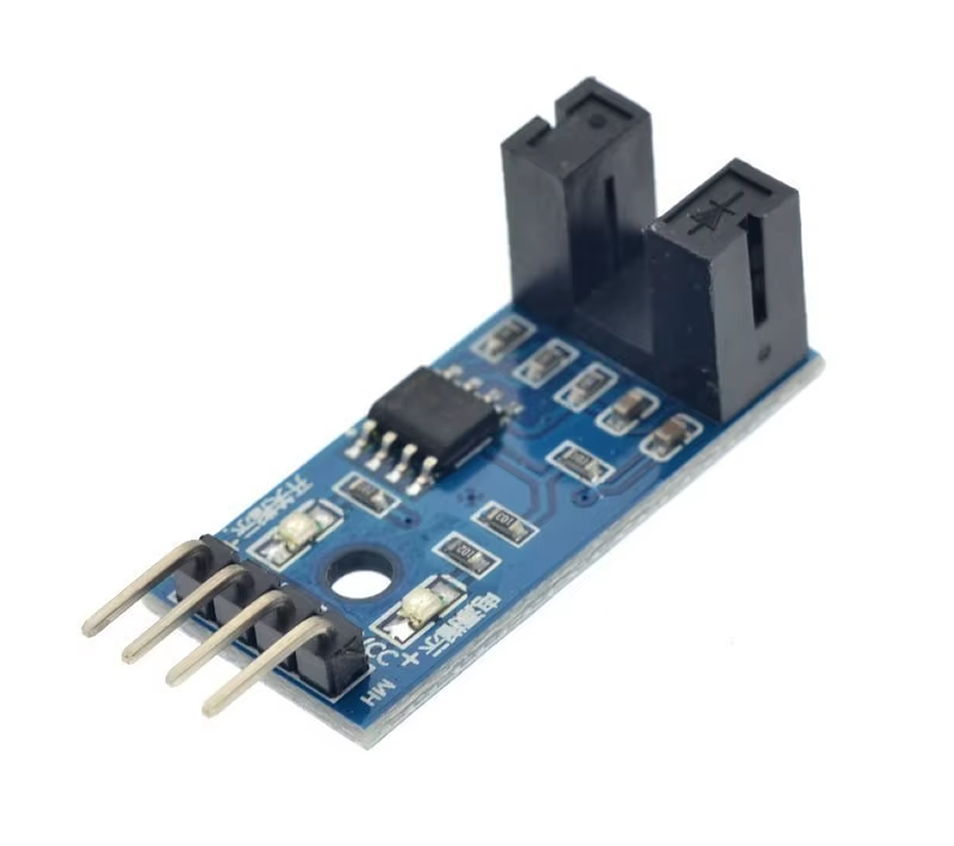
Módulo Sensor Optointerruptor de Ranura (ITR9606)
Interruptor óptico por barrera infrarroja con salida digitalizada y comparador LM393 integrado.
El módulo optointerruptor de ranura basado en el sensor ITR9606 es un dispositivo de detección óptica que integra un diodo emisor de infrarrojos de galio-arsénico y un fototransistor de silicio de alta sensibilidad alojados en una carcasa de policarbonato con una apertura de 5 mm. El principio operativo se basa en la interrupción física del haz de luz infrarroja: cuando un objeto sólido o disco encoder se interpone en la ranura, obstruye la barrera lumínica, modificando instantáneamente el estado del receptor. Equipado con un chip comparador LM393, el módulo entrega una señal digital limpia y libre de ruidos mecánicos, ideal para la medición precisa de velocidad angular, conteo de revoluciones y sistemas de posicionamiento industrial.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 3.3 V a 5.0 V |
| Corriente de Consumo | ~15 mA (Operación estable) |
| Ancho de la Ranura | 5.0 mm |
| Emisor Óptico | LED Infrarrojo de 940 nm |
| Detector Óptico | Fototransistor de Silicio NPN |
| Comparador de Señal | IC LM393 integrado en placa |
| Parámetro | Detalle |
|---|---|
| Formato de Salida Digital | TTL (Lógica Baja '0' / Alta '1') |
| Formato de Salida Analógica | Voltaje lineal directo del receptor |
| Tiempo de Respuesta | 15 µs (Conmutación de alta velocidad) |
| Indicadores visuales | LED de Encendido y LED de Estado DO |
| Dimensiones del PCB | 32 mm x 14 mm x 7 mm |
| Configuración de Pines | VCC, GND, DO (Digital), AO (Analógico) |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Cero Desgaste y Alta Conmutación: Al ser un interruptor puramente óptico sin contactos físicos mecánicos internos, no presenta rebotes eléctricos de acoplamiento ni fatiga estructural por fricción, tolerando millones de ciclos de trabajo.
• Señal Digital Cuadrada Perfecta: Gracias al acondicionamiento analógico provisto por el chip comparador LM393, la salida digital cambia de estado de manera abrupta e impecable, asegurando flancos limpios de subida y bajada compatibles con entradas digitales.
• Monitoreo de Salida Dual: La incorporación paralela del terminal analógico (AO) permite diagnosticar variaciones en la densidad de obstrucción de la ranura, acumulación de polvo óptico o calibración fina de umbrales externos.
Código Arduino Completo y Optimizado
Módulo Sensor Optointerruptor de Ranura (ITR9606)
Interruptor óptico por barrera infrarroja con salida digitalizada y comparador LM393 integrado.
El módulo optointerruptor de ranura basado en el sensor ITR9606 es un dispositivo de detección óptica que integra un diodo emisor de infrarrojos de galio-arsénico y un fototransistor de silicio de alta sensibilidad alojados en una carcasa de policarbonato con una apertura de 5 mm. El principio operativo se basa en la interrupción física del haz de luz infrarroja: cuando un objeto sólido o disco encoder se interpone en la ranura, obstruye la barrera lumínica, modificando instantáneamente el estado del receptor. Equipado con un chip comparador LM393, el módulo entrega una señal digital limpia y libre de ruidos mecánicos, ideal para la medición precisa de velocidad angular, conteo de revoluciones y sistemas de posicionamiento industrial.
Especificaciones Técnicas
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 3.3 V a 5.0 V |
| Corriente de Consumo | ~15 mA (Operación estable) |
| Ancho de la Ranura | 5.0 mm |
| Emisor Óptico | LED Infrarrojo de 940 nm |
| Detector Óptico | Fototransistor de Silicio NPN |
| Comparador de Señal | IC LM393 integrado en placa |
| Parámetro | Detalle |
|---|---|
| Formato de Salida Digital | TTL (Lógica Baja '0' / Alta '1') |
| Formato de Salida Analógica | Voltaje lineal directo del receptor |
| Tiempo de Respuesta | 15 µs (Conmutación de alta velocidad) |
| Indicadores visuales | LED de Encendido y LED de Estado DO |
| Dimensiones del PCB | 32 mm x 14 mm x 7 mm |
| Configuración de Pines | VCC, GND, DO (Digital), AO (Analógico) |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Cero Desgaste y Alta Conmutación: Al ser un interruptor puramente óptico sin contactos físicos mecánicos internos, no presenta rebotes eléctricos de acoplamiento ni fatiga estructural por fricción, tolerando millones de ciclos de trabajo.
• Señal Digital Cuadrada Perfecta: Gracias al acondicionamiento analógico provisto por el chip comparador LM393, la salida digital cambia de estado de manera abrupta e impecable, asegurando flancos limpios de subida y bajada compatibles con entradas digitales.
• Monitoreo de Salida Dual: La incorporación paralela del terminal analógico (AO) permite diagnosticar variaciones en la densidad de obstrucción de la ranura, acumulación de polvo óptico o calibración fina de umbrales externos.