HW-485 Sensor de Sonido para Arduino, Sensor con Micrófono, Detector de Sonido para Arduino MCUs
[HW-485] HW-485 Sensor de Sonido para Arduino, Sensor con Micrófono, Detector de Sonido para Arduino MCUs
Referencia Interna:
HW-485
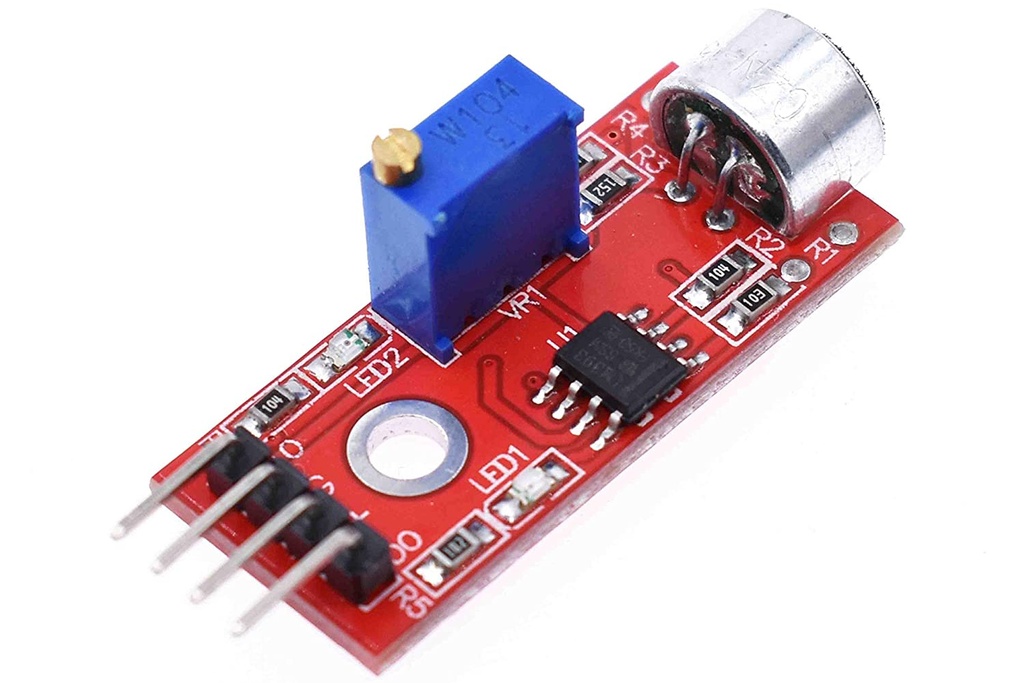
Módulo Sensor de Sonido / Micrófono HW-485
Detector de decibelios e impactos acústicos con salidas analógica y digital ajustables mediante comparador LM393.
El HW-485 es un transductor de ondas mecánicas acústicas compacto diseñado para registrar variaciones de presión sonora en entornos controlados y proyectos de domótica. La placa integra un micrófono de condensador electret de alta sensibilidad acoplado a un circuito de acondicionamiento basado en el amplificador LM393. Este dispositivo analiza la señal de audio ambiental entregando simultáneamente dos opciones de lectura: una salida analógica que mapea la envolvente de amplitud en tiempo real y una salida digital conmutada por hardware TTL que reacciona de forma inmediata ante impactos fuertes como aplausos, golpes o detonaciones, regulable mediante un potenciómetro de umbral.
Especificaciones Técnicas
| Parámetro Electrónico | Rango / Valor Oficial |
|---|---|
| Tensión de Alimentación (VCC) | 3.3 V a 5 V DC (Excelente compatibilidad con microcontroladores) |
| Corriente de Operación | ~4 mA a 5V (Consumo de potencia sumamente bajo) |
| Tipo de Componente Transductor | Micrófono Electret Cilíndrico de captura omnidireccional |
| Tipo de Señal Analógica (AO) | Tensión variable instantánea proporcional a la amplitud sónica |
| Tipo de Señal Digital (DO) | Nivel lógico TTL (Conmutación binaria activa en BAJO) |
| Circuito Comparador Base | Amplificador operacional doble LM393 de alta velocidad |
| Parámetro Operativo / Estructura | Rango / Valor Oficial |
|---|---|
| Frecuencia de Respuesta | 50 Hz a 20 kHz (Cubre la totalidad del rango audible humano) |
| Sensibilidad Ajustable | Potenciómetro analógico integrado de alta precisión (Trimpot) |
| Dimensiones Totales del PCB | 32 mm x 17 mm x 15 mm (Arquitectura compacta modular) |
| Indicadores Visuales integrados | LED1 (Presencia de alimentación) | LED2 (Disparo acústico digital DO) |
| Orificio de Fijación Mecánica | Diámetro de 3 mm para tornillo de montaje en chasis |
| Paso de Pines de Conexión | Header macho recto estándar con espaciado de 2.54 mm |
Ventajas del Módulo HW-485 en Automatización por Aplaudo
• Salida Digital TTL de Respuesta Inmediata: El pin DO reacciona en microsegundos ante picos de ruido que superen el umbral configurado, permitiendo al procesador ejecutar interrupciones por hardware sin retrasos de software.
• Doble Monitoreo de Audio: Opciones versátiles que permiten el registro analógico continuo del ruido ambiental para medidores sencillos de decibelios o el control discreto mediante el pin digital para interruptores de iluminación automáticos.
• Fácil Integración en Prototipos: No requiere etapas externas de preamplificación ni complejos filtrados activos, entregando señales limpias y listas para interactuar con placas de desarrollo educativo y comercial.
El HW-485 requiere de tres o cuatro conexiones lógicas dependiendo de si se desea explotar su salida analógica lineal, digital binaria o ambas en paralelo.
Galería Dinámica de Conexiones de Hardware
Para implementar un control acústico robusto y evitar falsos disparos intermitentes en el HW-485, domine el funcionamiento lógico y el tratamiento de señales:
- Voltaje de Reposo Analógico (Bias): Cuando el entorno se encuentra en silencio absoluto, el pin analógico AO no entrega 0V. Debido a la polarización del micrófono electret, la salida se estabiliza en un punto medio ($$\approx \text{VCC} / 2$$). Al producirse un sonido, la señal oscila rápidamente formando ondas senoidales por encima y por debajo de ese voltaje base.
- Fenómeno de Rebotes Acústicos: Un aplauso o golpe mecánico no genera un pulso eléctrico digital único y limpio en el pin DO. La onda sónica rebota en las paredes y el micrófono vibra múltiples veces durante milisegundos, provocando que el comparador LM393 envíe decenas de pulsos digitales rápidos por un solo impacto sonoro.
- Estrategia de Histéresis por Software: Para evitar que una lámpara cambie de estado repetidamente ante un solo aplauso, es fundamental programar una rutina de enclavamiento temporal o "debounce". Al detectar el primer pulso válido (bajada a nivel lógico **BAJO**), el programa ejecuta la acción y congela las lecturas del sensor durante un lapso controlado (entre **200 y 400 milisegundos**), ignorando los ecos residuales del sonido.
Módulo Sensor de Sonido / Micrófono HW-485
Detector de decibelios e impactos acústicos con salidas analógica y digital ajustables mediante comparador LM393.
El HW-485 es un transductor de ondas mecánicas acústicas compacto diseñado para registrar variaciones de presión sonora en entornos controlados y proyectos de domótica. La placa integra un micrófono de condensador electret de alta sensibilidad acoplado a un circuito de acondicionamiento basado en el amplificador LM393. Este dispositivo analiza la señal de audio ambiental entregando simultáneamente dos opciones de lectura: una salida analógica que mapea la envolvente de amplitud en tiempo real y una salida digital conmutada por hardware TTL que reacciona de forma inmediata ante impactos fuertes como aplausos, golpes o detonaciones, regulable mediante un potenciómetro de umbral.
Especificaciones Técnicas
| Parámetro Electrónico | Rango / Valor Oficial |
|---|---|
| Tensión de Alimentación (VCC) | 3.3 V a 5 V DC (Excelente compatibilidad con microcontroladores) |
| Corriente de Operación | ~4 mA a 5V (Consumo de potencia sumamente bajo) |
| Tipo de Componente Transductor | Micrófono Electret Cilíndrico de captura omnidireccional |
| Tipo de Señal Analógica (AO) | Tensión variable instantánea proporcional a la amplitud sónica |
| Tipo de Señal Digital (DO) | Nivel lógico TTL (Conmutación binaria activa en BAJO) |
| Circuito Comparador Base | Amplificador operacional doble LM393 de alta velocidad |
| Parámetro Operativo / Estructura | Rango / Valor Oficial |
|---|---|
| Frecuencia de Respuesta | 50 Hz a 20 kHz (Cubre la totalidad del rango audible humano) |
| Sensibilidad Ajustable | Potenciómetro analógico integrado de alta precisión (Trimpot) |
| Dimensiones Totales del PCB | 32 mm x 17 mm x 15 mm (Arquitectura compacta modular) |
| Indicadores Visuales integrados | LED1 (Presencia de alimentación) | LED2 (Disparo acústico digital DO) |
| Orificio de Fijación Mecánica | Diámetro de 3 mm para tornillo de montaje en chasis |
| Paso de Pines de Conexión | Header macho recto estándar con espaciado de 2.54 mm |
Ventajas del Módulo HW-485 en Automatización por Aplaudo
• Salida Digital TTL de Respuesta Inmediata: El pin DO reacciona en microsegundos ante picos de ruido que superen el umbral configurado, permitiendo al procesador ejecutar interrupciones por hardware sin retrasos de software.
• Doble Monitoreo de Audio: Opciones versátiles que permiten el registro analógico continuo del ruido ambiental para medidores sencillos de decibelios o el control discreto mediante el pin digital para interruptores de iluminación automáticos.
• Fácil Integración en Prototipos: No requiere etapas externas de preamplificación ni complejos filtrados activos, entregando señales limpias y listas para interactuar con placas de desarrollo educativo y comercial.
El HW-485 requiere de tres o cuatro conexiones lógicas dependiendo de si se desea explotar su salida analógica lineal, digital binaria o ambas en paralelo.
Galería Dinámica de Conexiones de Hardware
Para implementar un control acústico robusto y evitar falsos disparos intermitentes en el HW-485, domine el funcionamiento lógico y el tratamiento de señales:
- Voltaje de Reposo Analógico (Bias): Cuando el entorno se encuentra en silencio absoluto, el pin analógico AO no entrega 0V. Debido a la polarización del micrófono electret, la salida se estabiliza en un punto medio ($$\approx \text{VCC} / 2$$). Al producirse un sonido, la señal oscila rápidamente formando ondas senoidales por encima y por debajo de ese voltaje base.
- Fenómeno de Rebotes Acústicos: Un aplauso o golpe mecánico no genera un pulso eléctrico digital único y limpio en el pin DO. La onda sónica rebota en las paredes y el micrófono vibra múltiples veces durante milisegundos, provocando que el comparador LM393 envíe decenas de pulsos digitales rápidos por un solo impacto sonoro.
- Estrategia de Histéresis por Software: Para evitar que una lámpara cambie de estado repetidamente ante un solo aplauso, es fundamental programar una rutina de enclavamiento temporal o "debounce". Al detectar el primer pulso válido (bajada a nivel lógico **BAJO**), el programa ejecuta la acción y congela las lecturas del sensor durante un lapso controlado (entre **200 y 400 milisegundos**), ignorando los ecos residuales del sonido.