





Módulo Sensor de Movimiento Infrarrojo Pasivo (HC-SR501)
Detector de presencia PIR ajustable mediante lente de Fresnel para sistemas de seguridad y automatización.
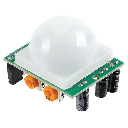
El módulo sensor infrarrojo pasivo (PIR) HC-SR501 está diseñado para detectar el movimiento de cuerpos que emitan radiación infrarroja (como seres humanos o animales) de forma segura y automatizada. Su funcionamiento se basa en un cristal piroeléctrico interno encapsulado en metal, el cual reacciona ante los cambios de temperatura en el entorno. La cubierta semiesférica blanca es un lente de Fresnel ranurado que divide el área de visión en múltiples zonas activas, concentrando los haces de luz térmica directamente hacia el sensor. Cuando un cuerpo caliente cruza entre estas zonas, el circuito integrado de control (BISS0001) procesa la variación diferencial y conmuta su salida digital a un nivel lógico ALTO. Es una solución altamente compacta y eficiente para sistemas de alarma perimetral, control de iluminación inteligente, domótica y dispositivos de bajo consumo.
Especificaciones Técnicas del Módulo
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 4.5 V a 20 V (Regulador interno de 3.3V) |
| Consumo de Corriente Estático | < 65 µA (Ultra bajo consumo en reposo) |
| Señal de Salida Digital | Nivel TTL (3.3 V en ALTO / 0 V en BAJO) |
| Rango de Distancia Ajustable | 3 a 7 Metros (Mediante potenciómetro incorporado) |
| Tiempo de Retardo (Delay Time) | 5 segundos a 300 segundos (Ajustable por potenciómetro) |
| Ángulo de Detección Operativo | Cono de apertura menor a 120° grados |
| Parámetro | Detalle |
|---|---|
| Modos de Disparo (Jumper) | L (No repetible) / H (Repetible - Reinicia el tiempo) |
| Tiempo de Bloqueo por Defecto | 2.5 segundos (Evita lecturas falsas consecutivas) |
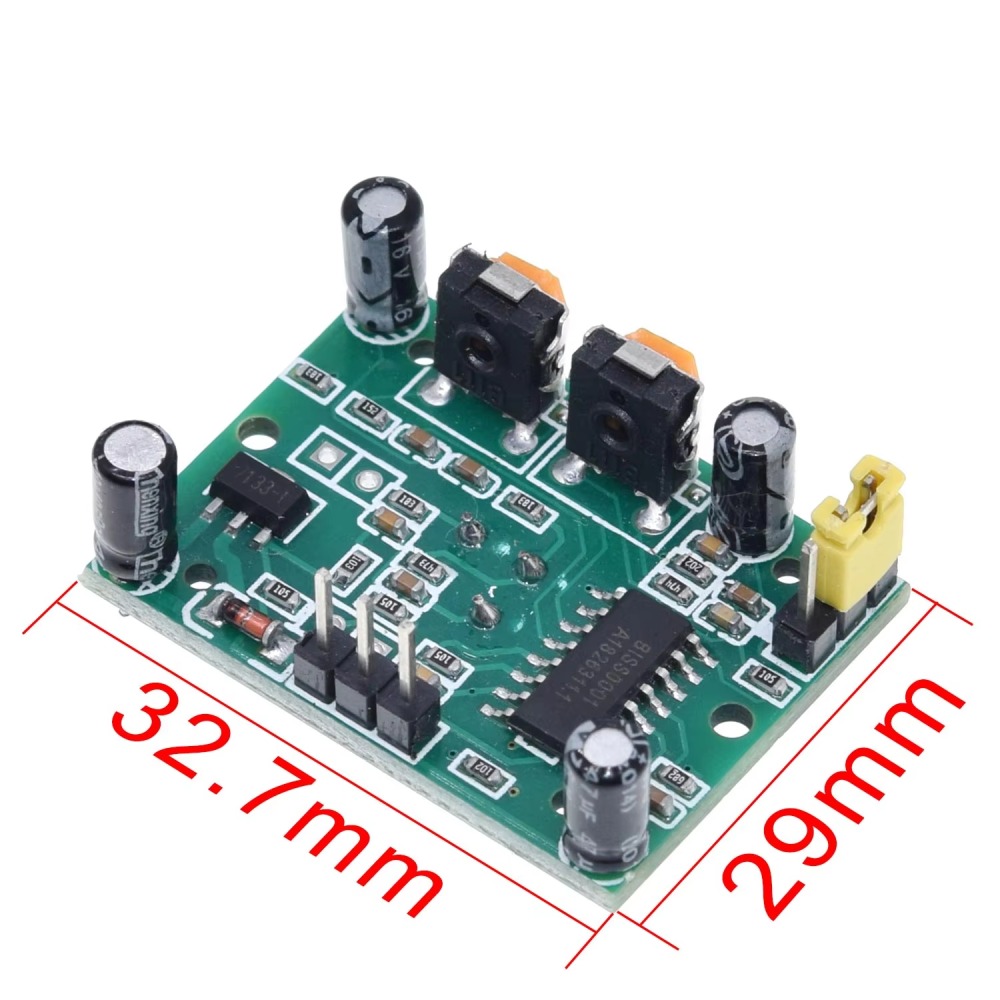
| Circuito Integrado Principal | BISS0001 (Controlador microprocesado PIR) |
| Mapeo de Pines Físicos | VCC (Positivo), OUT (Señal Digital), GND (Tierra) |
| Temperatura de Operación | -15 °C a +70 °C |
| Dimensiones de la Placa | 32 x 24 x 25 mm |
Diagrama de Conexiones y Mapeo de Pines
Configuración de Potenciómetros y Jumpers
• Ajuste de Sensibilidad (Sx): Girar en sentido horario aumenta la distancia de detección (hasta 7 metros); en sentido antihorario la reduce (hasta 3 metros).
• Ajuste de Tiempo (Tx): Determina cuánto tiempo permanece la salida en ALTO tras cesar el movimiento. Girar en sentido horario prolonga el retraso hasta 5 minutos.
• Modo Jumper H (Repetible): Si el sensor detecta movimiento continuo mientras la salida está en ALTO, el temporizador se reinicia manteniendo la salida activa de forma ininterrumpida.
• Modo Jumper L (No repetible): La salida pasa a ALTO e ignora cualquier movimiento posterior durante el conteo del potenciómetro, volviendo obligatoriamente a BAJO al expirar el tiempo.
Código Arduino de Monitoreo de Presencia en Tiempo Real
Módulo Sensor de Movimiento Infrarrojo Pasivo (HC-SR501)
Detector de presencia PIR ajustable mediante lente de Fresnel para sistemas de seguridad y automatización.
El módulo sensor infrarrojo pasivo (PIR) HC-SR501 está diseñado para detectar el movimiento de cuerpos que emitan radiación infrarroja (como seres humanos o animales) de forma segura y automatizada. Su funcionamiento se basa en un cristal piroeléctrico interno encapsulado en metal, el cual reacciona ante los cambios de temperatura en el entorno. La cubierta semiesférica blanca es un lente de Fresnel ranurado que divide el área de visión en múltiples zonas activas, concentrando los haces de luz térmica directamente hacia el sensor. Cuando un cuerpo caliente cruza entre estas zonas, el circuito integrado de control (BISS0001) procesa la variación diferencial y conmuta su salida digital a un nivel lógico ALTO. Es una solución altamente compacta y eficiente para sistemas de alarma perimetral, control de iluminación inteligente, domótica y dispositivos de bajo consumo.
Especificaciones Técnicas del Módulo
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 4.5 V a 20 V (Regulador interno de 3.3V) |
| Consumo de Corriente Estático | < 65 µA (Ultra bajo consumo en reposo) |
| Señal de Salida Digital | Nivel TTL (3.3 V en ALTO / 0 V en BAJO) |
| Rango de Distancia Ajustable | 3 a 7 Metros (Mediante potenciómetro incorporado) |
| Tiempo de Retardo (Delay Time) | 5 segundos a 300 segundos (Ajustable por potenciómetro) |
| Ángulo de Detección Operativo | Cono de apertura menor a 120° grados |
| Parámetro | Detalle |
|---|---|
| Modos de Disparo (Jumper) | L (No repetible) / H (Repetible - Reinicia el tiempo) |
| Tiempo de Bloqueo por Defecto | 2.5 segundos (Evita lecturas falsas consecutivas) |
| Circuito Integrado Principal | BISS0001 (Controlador microprocesado PIR) |
| Mapeo de Pines Físicos | VCC (Positivo), OUT (Señal Digital), GND (Tierra) |
| Temperatura de Operación | -15 °C a +70 °C |
| Dimensiones de la Placa | 32 x 24 x 25 mm |
Diagrama de Conexiones y Mapeo de Pines
Configuración de Potenciómetros y Jumpers
• Ajuste de Sensibilidad (Sx): Girar en sentido horario aumenta la distancia de detección (hasta 7 metros); en sentido antihorario la reduce (hasta 3 metros).
• Ajuste de Tiempo (Tx): Determina cuánto tiempo permanece la salida en ALTO tras cesar el movimiento. Girar en sentido horario prolonga el retraso hasta 5 minutos.
• Modo Jumper H (Repetible): Si el sensor detecta movimiento continuo mientras la salida está en ALTO, el temporizador se reinicia manteniendo la salida activa de forma ininterrumpida.
• Modo Jumper L (No repetible): La salida pasa a ALTO e ignora cualquier movimiento posterior durante el conteo del potenciómetro, volviendo obligatoriamente a BAJO al expirar el tiempo.