AS5600 Modulo Encoder magnético, Sensor de Angulo 12 bits, 3.3V, I2C, PWM
[AS5600] AS5600 Modulo Encoder magnético, Sensor de Angulo 12 bits, 3.3V, I2C, PWM
Referencia Interna:
AS5600
Módulo Encoder Magnético Rotativo (AS5600)
Sensor de posición angular absoluto de alta resolución sin contacto para control preciso de motores.
El módulo codificador magnético AS5600 es un sensor avanzado diseñado para determinar la posición angular absoluta de un eje mediante tecnología de efecto Hall sin contacto. Su principio operativo detecta los cambios del campo magnético generados por un imán diametral sobrepuesto, eliminando el desgaste mecánico y los errores por suciedad. Esta arquitectura interna ofrece una alta resolución de 12 bits que se transmite mediante comunicación I2C o salidas analógicas continuas proporcionales directas. Es una solución extraordinariamente compacta y fiable para servomotores, cardanes, robótica y sistemas de automatización industrial exigentes.
Especificaciones Técnicas del Módulo
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 3.3 V o 5.0 V seleccionable |
| Resolución Angular | 12 bits (4096 posiciones por vuelta) |
| Protocolo de Comunicación | I2C estándar (Dirección esclavo 0x36) |
| Modos de Salida | Analógica ratiométrica o PWM |
| Rango de Ángulo Programable | Desde 18° hasta un giro total de 360° |
| Corriente de Operación | 6.5 mA típico (Modo activo completo) |
| Parámetro | Detalle |
|---|---|
| Consumo en Modo Reposo | Menor a 1.5 mA de corriente |
| Imán Requerido | Imán de neodimio de tipo diametral |
| Distancia Máxima al Imán | 0.5 mm hasta un límite de 3.0 mm |
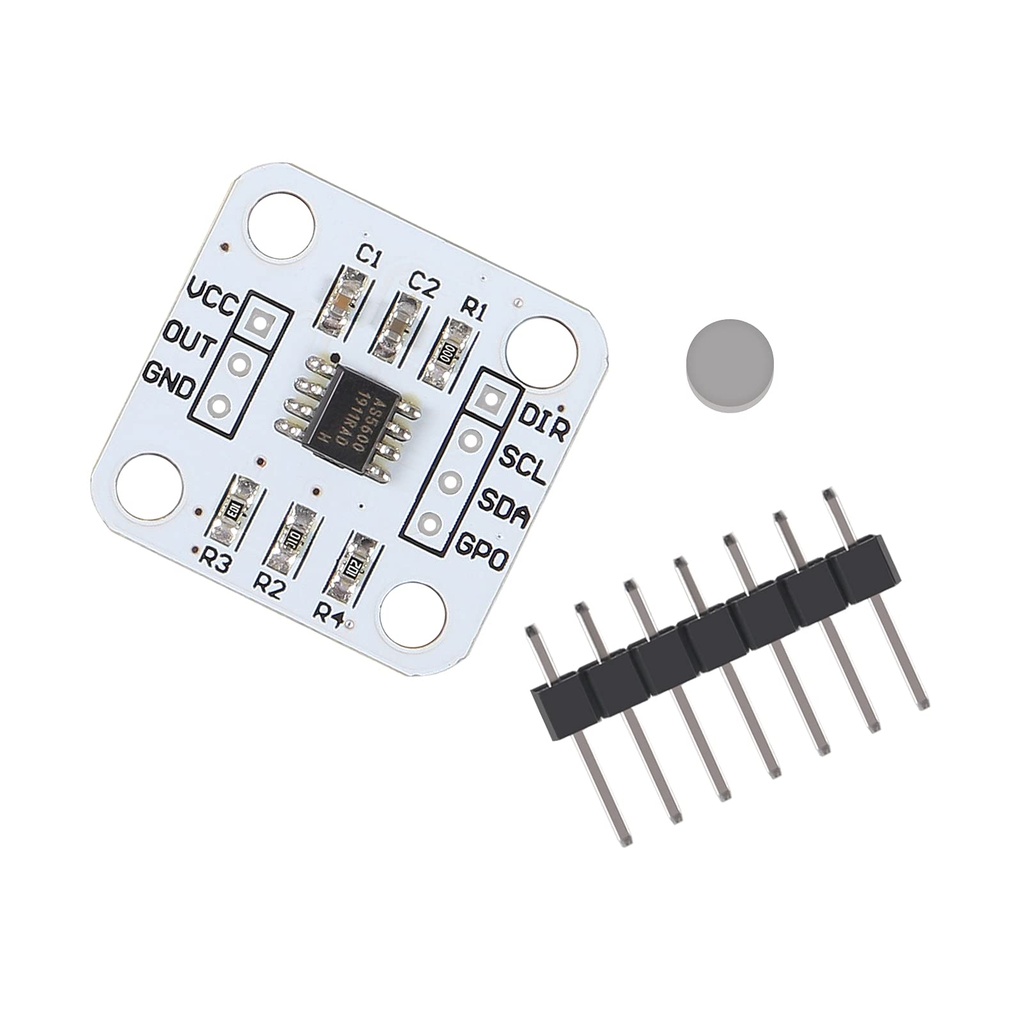
| Pines de Interfaz Principal | VCC, GND, SDA, SCL, OUT, DIR |
| Pin DIR (Dirección) | GND = Horario / VCC = Antihorario |
| Dimensiones de la Placa | 15 x 16 mm |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Medición Absoluta Sin Contacto: Retiene la posición exacta del ángulo tras un apagado repentino del sistema, evitando calibraciones o retornos a cero de ejes.
• Inmunidad al Desgaste Físico: Al operar mediante detección de campo magnético a distancia, no sufre degradación mecánica como los potenciómetros rotativos tradicionales.
• Precisión de 12 Bits: Permite desglosar una revolución completa de 360 grados en 4096 pasos digitales, ofreciendo una tolerancia menor a 0.1 grados en control.
• Flexibilidad de Hardware: Brinda salidas simultáneas a través del bus I2C industrial para datos digitales y salidas de tensión analógica para sistemas heredados.
Código Arduino de Medición en Tiempo Real
Módulo Encoder Magnético Rotativo (AS5600)
Sensor de posición angular absoluto de alta resolución sin contacto para control preciso de motores.
El módulo codificador magnético AS5600 es un sensor avanzado diseñado para determinar la posición angular absoluta de un eje mediante tecnología de efecto Hall sin contacto. Su principio operativo detecta los cambios del campo magnético generados por un imán diametral sobrepuesto, eliminando el desgaste mecánico y los errores por suciedad. Esta arquitectura interna ofrece una alta resolución de 12 bits que se transmite mediante comunicación I2C o salidas analógicas continuas proporcionales directas. Es una solución extraordinariamente compacta y fiable para servomotores, cardanes, robótica y sistemas de automatización industrial exigentes.
Especificaciones Técnicas del Módulo
| Parámetro | Detalle |
|---|---|
| Tensión de Alimentación | DC 3.3 V o 5.0 V seleccionable |
| Resolución Angular | 12 bits (4096 posiciones por vuelta) |
| Protocolo de Comunicación | I2C estándar (Dirección esclavo 0x36) |
| Modos de Salida | Analógica ratiométrica o PWM |
| Rango de Ángulo Programable | Desde 18° hasta un giro total de 360° |
| Corriente de Operación | 6.5 mA típico (Modo activo completo) |
| Parámetro | Detalle |
|---|---|
| Consumo en Modo Reposo | Menor a 1.5 mA de corriente |
| Imán Requerido | Imán de neodimio de tipo diametral |
| Distancia Máxima al Imán | 0.5 mm hasta un límite de 3.0 mm |
| Pines de Interfaz Principal | VCC, GND, SDA, SCL, OUT, DIR |
| Pin DIR (Dirección) | GND = Horario / VCC = Antihorario |
| Dimensiones de la Placa | 15 x 16 mm |
Diagrama de Conexiones y Mapeo de Pines
Ventajas del Módulo
• Medición Absoluta Sin Contacto: Retiene la posición exacta del ángulo tras un apagado repentino del sistema, evitando calibraciones o retornos a cero de ejes.
• Inmunidad al Desgaste Físico: Al operar mediante detección de campo magnético a distancia, no sufre degradación mecánica como los potenciómetros rotativos tradicionales.
• Precisión de 12 Bits: Permite desglosar una revolución completa de 360 grados en 4096 pasos digitales, ofreciendo una tolerancia menor a 0.1 grados en control.
• Flexibilidad de Hardware: Brinda salidas simultáneas a través del bus I2C industrial para datos digitales y salidas de tensión analógica para sistemas heredados.